")
")
")
")
")

Сучасні системи електронного автоматичного керування різними всілякими технічними об’єктами, а також автомобільними бортовими пристроями, мають майже однакову схожу структуру.
Принцип роботи різних датчиків ЭСАУ приблизно однаковий, – перетворення інформації про значеннях, які перетворюються з неелектричних параметрів в електричний сигнал — напруга, струм, частоту, фазу і т. д. Отримані сигнали перевтілюються в цифровий код і надходять у спеціальний мікроконтролер.
Мікроконтролер на підставі значень цих сигналів і у відповідності із закладеним у нього програмним забезпеченням приймає рішення, керує через виконавчі механізми (реле, соленоїди, електродвигуни) об’єктом.
Можливість вдосконалення автомобільних електронних систем багато в чому залежить від наявності надійних, точних і недорогих датчиків.
У 60-х роках автомобілі були обладнані датчиками тиску масла, рівня палива, температури охолоджуючої рідини. Їх виходи були підключені до стрілочним або ламповим індикаторами на щитку приладів.
У 70-х роках автомобільні компанії почали боротися за зменшення кількості токсичних викидів з глушника автомобіля — потрібні були додаткові датчики для управління силовою установкою, які необхідні для забезпечення нормальної роботи електронного запалювання, системи вприскування палива, трикомпонентного нейтралізатора, для точного завдання співвідношення повітря/паливо в робочій суміші, для зменшення токсичності вихлопних газів.
У 80-х роках почали приділяти більше уваги безпеці водія і пасажирів — з’явилися антиблокувальна система гальмування (ABS) і повітряні мішки безпеки.
У силовому агрегаті (ДВЗ) датчики використовуються для вимірювання температури та тиску більшості текучих середовищ (температура всмоктуваного повітря, абсолютний тиск у впускному колекторі, тиск масла, температура охолоджуючої рідини, тиск палива в системі упорскування).
Майже до всіх рухомих частин автомобіля підключені датчики швидкості або положення (швидкість автомобіля, положення дросельної заслінки, положення колінчастого валу, положення розподільного вала, положення та швидкість обертання вала в коробці перемикання передач, положення клапана рециркуляції вихлопних газів).
Інші датчики визначають рівень детонації, навантаження двигуна, пропуски займання, вміст кисню у вихлопних газах.
Є датчики, які визначають положення сидінь.
В системі управління кліматом (клімат-контроль) використовуються різні датчики в кондиціонері для визначення тиску і температури холодоагенту, температури повітря в салоні і за бортом.
Після появи антиблокувальної системи гальмування і активної підвіски потрібні датчики для визначення швидкості обертання коліс, висоти кузова по відношенню до шасі, тиску в шинах.
Датчики удару і акселерометри потрібні для правильного функціонування фронтальних і бічних повітряних мішків безпеки. Для переднього пасажирського сидіння з допомогою датчиків визначають наявність пасажира, його вага. Ця інформація використовується для оптимального наддуву мішка безпеки на передньому сидінні. Інші датчики використовуються для бічних і стельових повітряних мішків безпеки, а також спеціальних повітряних мішків для захисту шиї і голови.
На сучасних автомобілях протиблокувальні гальмівні системи гальмування замінюються більш складними та ефективними системами управління стабільністю руху автомобіля. Виникає необхідність у нових датчиках. Розробляються і вже є датчики швидкості обертання автомобіля навколо вертикальної осі, датчики для попередження зіткнень (наприклад радарні), датчики для визначення близькості інших автомобілів, датчики положення рульового колеса, бічного прискорення, швидкості обертання кожного колеса, крутного моменту на валу двигуна і т. д. Управління гальмівною системою автомобіля стає частиною більш загальної та ефективної системи електронного управління курсовою стійкістю та стабільністю руху.
З сказаного ясно, що сьогодні датчики встановлюються практично у всіх системах автомобіля.
На рис. 2.1, а показано найбільш раціональне розташування різних датчиків на автомобілі.
> Датчики автомобільних електронних систем можна класифікувати за трьома ознаками: за принципом дії, типом енергетичного перетворення і основним призначенням.
За принципом дії датчики підрозділяють на електро контактні, потенціометри історичні, оптичні, оптоелектронні, електромагнітні, індуктивні, магниторезистивные, магнітострикційні, фото – та п’єзоелектричні, датчики на ефекти Холла, Доплера, Кишені, Зеєбека, Вигоида.
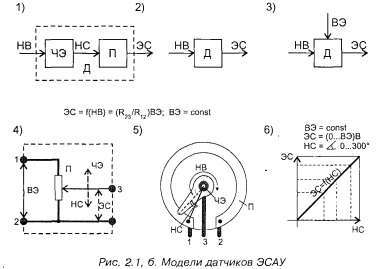
Залежно від енергетичного перетворення (рис. 2.1, б) датчики (Д) бувають активними (поз. 2 на рис. 2.1, б), у яких вихідний електричний сигнал (ЕС) виникає як наслідок вхідного неелектричного впливу (НВ) без додатка сторонньої електричної енергії за рахунок внутрішнього фізичного ефекту (наприклад фотоефекта), і пасивними (поз. 3 на рис. 2.1, б), в яких електричний сигнал (ЕС) є наслідок модуляції зовнішньої електричної енергії (ВЕ) управителем неелектричним впливом (НВ). Наприклад, потенціометричний датчик, показаний па рис. 2.1, б (поз. 5), є пасивним перетворювачем кута повороту осі потенціометра (чутливого елемента ЧЕ) в електричний сигнал. Електричний сигнал (ЕС) з’явиться на виході потенціометра тільки після того, як на резистивну доріжку (П) буде подано зовнішня напруга (ВЕ). Слід зазначити, що всередині датчика, за допомогою чутливого елемента (ЧЕ), завжди має місце внутрішнє перетворення зовнішнього неелектричного впливу (НВ) у проміжний неелектричних сигнал (НС), що показано на рис. 2.1, б (поз. 1). Стосовно до датчика кута повороту, кутове положення осі потенціометра є неелектричним сигналом (НС) на виході чутливого елемента. Цього неэлектрическому сигналу (НС) відповідає вихідний електричний сигнал (ЕС) датчика, якщо подана па резистивну доріжку (П) зовнішня напруга (ВЕ) постійно (рис. 2.1, б, поз. 4). Лінійна характеристика перетворення (рис. 2.1, б, поз. 6) може бути легко змінена на квадратичну, ступеневу і будь-яку нелінійну із заданою крутизною, що досягається підбором конструктивних розмірів (довжини, ширини, товщини) резистивної доріжки.
Рис. 2.1, а. Розташування датчиків на автомобілі
1 — датчик конфігурації впускного колектора з керованою геометрією, 2 — датчик тахометра, 3 — датчик положення розподільного вала, 4 — датчик навантаження двигуна, 5 — датчик положення колінчастого валу, 6 — датчик крутного моменту двигуна, 7 — датчик кількості масла, 8 — датчик температури охолоджуючої рідини, 9 — датчик швидкості автомобіля,10 — датчик тиску масла, 11— датчик рівня охолоджуючої рідини, 12 — радарний датчик системи гальмування, 13 — датчик атмосферного тиску, 14 — радарний датчик системи запобігання зіткнень, 15 — датчик швидкості обертання ведучого вала коробки передач, 16 — датчик обраної передачі в коробці передач, 17 — датчик тиску палива в рампі форсунок, 18 — датчик швидкості обертання керма, 19 — датчик положення педалі, 20 — датчик швидкості обертання автомобіля навколо вертикальної осі, 21 — датчик протиугінної системи, 22 — датчик положення сидіння, 23 — датчик прискорення при фронтальному зіткненні, 24 — датчик прискорення при бічному зіткненні, 25 — датчик тиску палива в баку, 26 — датчик рівня палива в баку, 27 — датчик висоти кузова по відношенню до шасі, 28 — датчик кута повороту керма, 29 — датчик дощу або туману, 30 — датчик температури забортного повітря, 31 — датчик ваги пасажира, 32 — датчик кисню, 33 — датчик наявності пасажира в сидіння, 34 — датчик положення дросельної заслінки, 35 — датчик пропусків займання, 36 — датчик положення клапана рециркуляції вихлопних газів, 37— датчик абсолютного тиску у впускному колекторі, 38 — датчик азимута, 39 — датчик швидкості обертання коліс, 40 — датчик тиску в шинах.
З наведеного прикладу зрозуміло, що будь-датчик завжди складається, як мінімум, з двох частин — з чутливого елемента (ЧЕ), здатного сприймати вхідний неелектричне вплив (НВ), і з перетворювача (П) проміжного неелектричного сигналу (НС) від чутливого елемента у вихідний електричний сигнал (ЕС).
За призначенням датчики класифікуються за типом керуючого неелектричного впливу: датчики крайових положень, датчики кутових і лінійних переміщень, датчики частоти обертання і числа обертів, датчики відносного або фіксованого положення, датчики механічного впливу, датчики тиску, датчики температури, датчики вологості, датчики концентрації кисню, датчик радіації та ін.
> Датчики підключаються до ЕБУ або засобів індикації для передачі інформації про параметри контрольованого середовища. В автомобільних системах ціпа і надійність мають величезне значення і при інших рівних умовах завжди вибирають датчик з найменшим числом з’єднувачів. Якщо до датчика слід підключити 5-6 проводів (наприклад, ЛДТ), доцільно розмістити мікросхему обробки сигналу безпосередньо на датчику і передавати дані контролера через послідовний інтерфейс.
При підключенні датчиків до ЕБУ слід мати на увазі, що шасі (маса) автомобіля не може бути використана в якості вимірювальної землі. Між точкою підключення ЕБУ до масі і датчиком напруга може падати до I за рахунок струмів силових елементів по масі, що неприпустимо при штатній роботі датчика, так і при його діагностиці.
Переважна більшість датчиків з числа перерахованих вище вже досить широко використовується на сучасних імпортних і вітчизняних автомобілях. Їх пристрій, робота і принципи діагностування докладно описані в [3] і [4|. Але є й такі, які з’явилися відносно недавно, перебувають на стадії впровадження в нові автомобільні системи. Опису саме таких датчиків приділена найбільша увага в цій главі.
 {jcomments on}
{jcomments on}
2









")
")






")


