")
")
")
")
")
Управління. Керування автомобілем базується в межах фізичних можливостей управління і відповідно має враховувати три ступені свободи автомобіля як на площині дороги, мається на увазі поперечна і поздовжня складові руху автомобіля і звичайно ж поворот щодо осі вертикалі. Для початку необхідно визначити, як саме має відбуватися рух автомобіля у відповідності з діями водія, а також поведінка водія на дорозі.
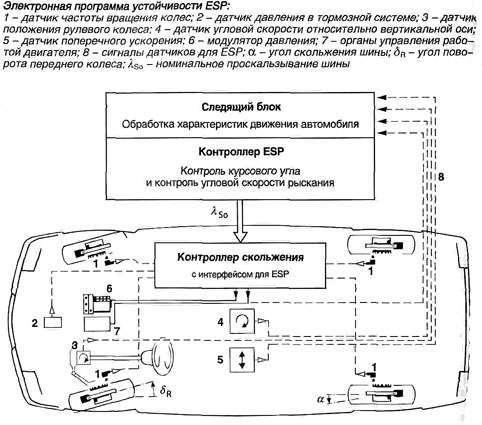
Для зменшення різниці між двома діями шини повинні керуватися спеціальними механізмами. На схемі ви бачите структуру управління, яка в свою чергу складається з головного контролера, та додаткових контролерів ковзання. Блок стеження займається визначенням змінної контрольованого стану. Ведеться оцінка сигналів від датчика положення 3 рульового колеса, датчика тиску (2) гальмівної системи, а також органи управління роботою двигуна. Крім швидкості руху транспортного засобу в розрахунку враховуються необхідні дані коефіцієнтів зчеплення між шинами і дорожнім покриттям. Наступні параметри оцінюються на основі сигналів, що надходять від датчиків кутової швидкості поперечного прискорення і тиску в гальмівній системі. Після чого обчислюється момент відносно вертикальної осі.
{jcomments on}
2









")
")






")


